
Intelligent, Autonomous Mobile Robots and Robot Kits for
Education, Hobby, Entertainment, Commercial

316 NW 17th Street, Suite A, Gainesville, FL 32603
Click here for ordering information & prices.
|
|
RobobugTM
|
Robobug Specs
|
|
RobobugTM is one of the most sophisticated programmable, autonomous, six-legged walking robots available at this price. RobobugTM uses a Mekatronix MSCC11 microcontroller with 2Kbytes of EEROM for leg motion control. A proprietary leg walking algorithm allows you to develop different gaits on the robot.
|
| Robobug Construction |

|
|
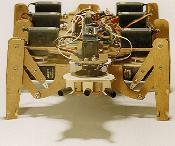
RobobugTM is available constructed with either model aircraft plywood or black ABS plastic. The main body is slightly more than 15 1/2 inches long while the body-plus-leg projection width approximately equals 10 3/4 inches. An optional, servo-controlled, pan-tilt head on which sensors can be mounted is also available. Leg joints use nylon bushings to decrease friction. The hollow legs allow sensor wiring to pass from the foot to the "knee" joint without being exposed or susceptible to snagging onto objects.
|
|
The RobobugTM spinal column furnishes a convenient secure passageway to thread the twelve, 3-wire, servo cables from the legs to the MSCC11 microcontroller. The spinal configuration and "efferent nerve" wires readily yield their source of inspiration!
|
| Robobug Legs |
|
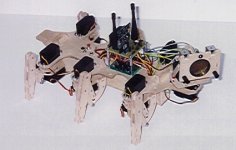
Each RobobugTM leg is driven by two high quality servos to provide two degrees of freedom. One servo provides a sweeping rotation motion from front-to-back and back-to-front. The other leg servo lifts the leg in an up-and-down manner. RobobugTM clears more than 3 inches above the floor in its normal stance. At full leg extension, RobobugTM clears about 4 inches. Appropriately timed servo actuation provided by the MekatronixTM proprietary walking algorithm provides the necessary intelligence to enable RobobugTM to walk.
|
| Sensors |

|
Auxiliary sensor kits (not included with the base bug) permit you to implement collision avoidance, IR remote control, contact sensation (momentary tactile switch) at the "feet" and sonar detection of obstacles. You can mount IR detectors and emitters on the front of the robot or on a MekatronixTM pan-tilt head (sold separately). You can write programs to sweep the head back and forth to provide wide angle coverage of the sensors that you mount on the head, e.g., IR, sonar, visible light.
|
| Power Requirements |
|
Five NiCd rechargeable C-cell batteries fit into RobobugTM's body cavity to power the servos while a 9 volt NiCd battery powers the electronics. Regular capacity C-cells provide about 15 minutes of walking before recharge is necessary. Higher capacity C-cells can allow for twice that amount of time.
|
| Spinal Column Controller |
A Motorola MC68HC11 based microcontroller circuit, the MSCC11, features the spinal column control ("efferent nerves") of leg actuation, IR emitter modulation, RS232-Five volt communications as well as some auxiliary sensation (IR detection, feet ground contact switches) through "efferent nerves". The Spinal Column ControllerTM provides exceptional versatility for the robot. Control and communication features include the following:
- MC68HC11 microcontroller with 2Kbytes of EEPROM.
- Male headers to connect all twelve leg actuators directly to the processor board.
- Four extra male headers to which you can connect a pan head and three other actuators you might want to add later (optional).
- Male headers to attach IR sensors and IR emitters (optional).
- Male headers to input "feet" switches (optional)
- Five-volt serial communication interface for downloading and uploading programs and data to a personal computer. The serial bus implements RS-232 protocol except for the voltages. The Mekatronix circuit board MB2325 (sold separately) converts this processor serial bus to a standard RS-232 bus.
- High speed, 5volt synchronous serial bus. Up to 1 MHz data rate.
- 5 Volt regulator.
- Low-voltage-inhibit reset circuit.
|
| Superbrain Enhancement |
|
To make RobobugTM smarter you can add an MTJRPO11 microcontroller with 32Kbytes of RAM with the Mekatronix drive software to interface the MTJPRO11 microcontroller to RobobugTM's own MSCC11 Spinal Column ControllerTM. This brain enhancement will permit you to write longer, more sophisticated programs, including learning programs, that will truly amaze you and us!
|
| Standard Software |
Manuals |
|
MekatronixTM proprietary walking software.
|
Robobug Manual
(Printed, bound copies can be purchased from our distributors.)
|
| Development Software |
|---|
RobobugTM programs can be written in MC68HC11 Assembly Language, C, or BASIC.
- Freeware Software
- PCBUG11 freeware for downloading Motorola S19 files.
- Freeware MC68HC11 Assembly Language.
- Commercially Available Software (Sold Separately)
- ICC11 C compiler
- Interactive C (requires Superbrain option)
|
|
Refer questions, comments, or errors regarding this website to the webmaster@mekatronix.com
All other questions should be referred to Tech Support
Copyright
©1995-2000 Mekatronix, Inc.
All rights reserved.
|
)
)
)
)